물류용 텔레스코픽 벨트 컨베이어
사양/매개변수
텔레스코픽 벨트 컨베이어는 주로 고정 섹션, 텔레스코픽 섹션, 텔레스코픽 구동 메커니즘, 벨트 운반 메커니즘, 충돌 방지 메커니즘 및 제어 시스템으로 구성됩니다.
또한 후프 구조, 리프팅 시스템, 등반 메커니즘 등과 같은 고객 요구 사항을 기반으로 하는 일부 보조 메커니즘도 포함됩니다.
텔레스코픽 유형 기계는 기존 구조 또는 험프 구조일 수 있습니다. 험프 텔레스코픽 기계는 주로 조건이 까다로운 현장에서 사용되며, 차량을 내릴 때 텔레스코픽 기계의 앞쪽 끝에 인터페이스를 배치하는 것이 편리합니다.
텔레스코픽 컨베이어의 다양한 구조:
고정식 텔레스코픽 컨베이어,
경사형 텔레스코픽 컨베이어 / 클라이밍 텔레스코픽 컨베이어 리프팅 텔레스코픽 컨베이어
이동식/모바일 텔레스코픽 컨베이어 유형, 구즈넥 유형
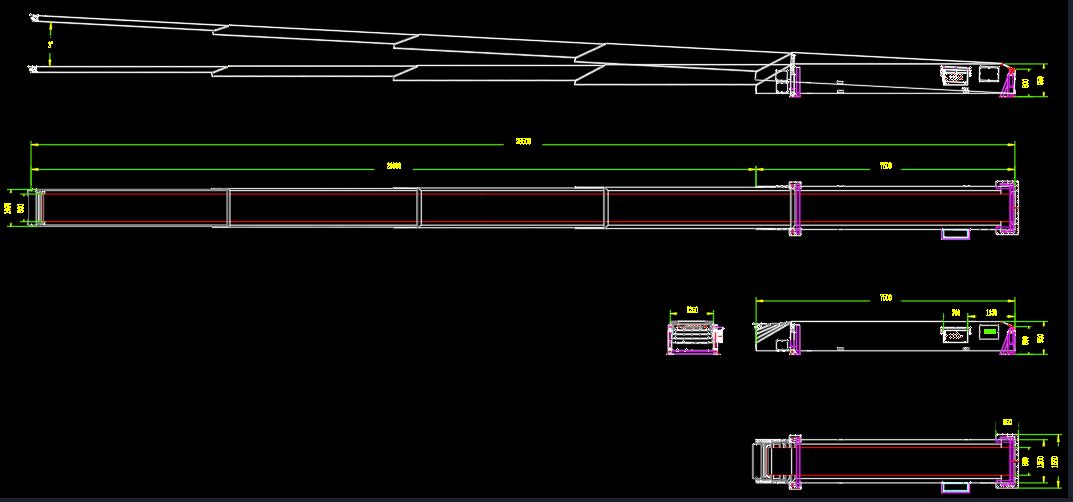
매개변수
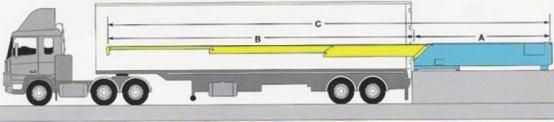
| 아니요. | 투기 | (mm) | 비(mm) | C(mm) | 전자(mm) | 혹 구조 | 벨트폭(mm) |
| 고정단 | 텔레스코픽 엔드 | 총 길이 | 고정단 높이 | ||||
| 1 | 3 | 5000 | 7000 | 12000 | 800 | —— | 800 |
| 2 | 6000 | 8400 | 14400 | 800 | 선택 과목 | ||
| 3 | 4 | 6000 | 12600 | 18600 | 900 | 선택 과목 | |
| 4 | 8000 | 17000 | 25000 | 900 | 선택 과목 | ||
| 5 | 5 | 6000 | 16000 | 22000 | 900 | 선택 과목 | |
| 6 | 7500 | 21000 | 28500 | 900 | 선택 과목 |
주요 기술 매개변수


1. 컨베이어 벨트의 하중 운반 능력은 60kg/㎡ 이상이며 포지티브 및 네거티브 전달 기능을 갖추고 있습니다.
2. 벨트 작동시 벨트 좌우 스윙 거리는 20mm 미만입니다.
3. 운반 속도: 20-45m/min(주파수 제어, 초기 속도는 30m/min);
고속 텔레스코픽 컨베이어 속도::40-70m/min(주파수 제어, 초기 속도는 55m/min).
4. 최대 스트레치 속도 10m/min, 주파수 조정 가능.
5. 벨트 폭 800mm, 두께 3mm, PVK/PVC 소재.
6. 동체는 충분한 강도를 가져야 하며, 정지 상태 및 최대 부하 상태에서 완전히 확장되어야 하며, 3개 섹션 기계의 처짐은 50mm 미만이어야 하고, 4개 섹션의 낙하는 120mm 미만이어야 하며, 5개 섹션은 150mm 미만이어야 합니다.
7. 모터 브랜드: SEW 또는 Nord.
9. 확장 체인은 스프로킷 톱니 표면이 담금질 된 고품질 브랜드를 채택합니다.
구성 특징
1. 텔레스코픽 모터, 구동 모터 및 유압 스테이션은 국내외에서 잘 알려진 브랜드입니다.
2. 텔레스코픽 기계의 리프팅 및 하강 각도는 일반적으로 -1°에서 3° 사이이며 프로젝트 상황에 따라 조정됩니다.
3. 텔레스코픽 이송 모터가 시동되면 느린 시동 및 포인팅 동작 기능이 있습니다.텔레스코픽하는 동안 메일을 전달하는 기능을 실현할 수 있으며 정방향 및 역방향 전달 기능을 실현할 수 있으며 정방향 및 역방향 전환은 별도로 제어되고 원활하게 전환되어야 합니다.