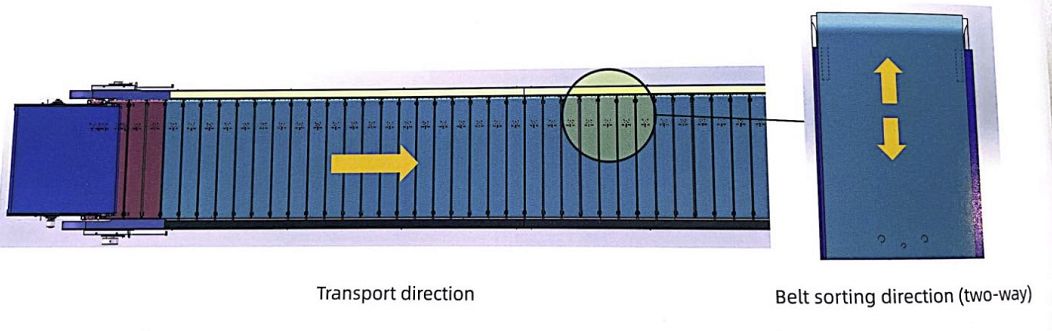
선형 크로스 벨트 분류기는 체인을 통해 모터로 구동되어 소포를 운반하는 벨트 운반 장치를 구동합니다.스캐닝 시스템이 슈트와 크기 정보를 얻은 후PLC 요구를 통해 슈트의 전환 메커니즘을 작동시켜 트롤리의 벨트를 분류 방향으로 하나씩 움직이게 하여 소포를 슈트에 전달하고 소포를 분류하는 목적을 달성합니다.
| 안건 | 매개변수 | ||
| 모터 파워 | 11kw(30-40m) | 15kw(40-50m) | 18.5kw(50-60m) |
| 운반 폭 | 1000mm | ||
| 이송 속도 | 1.5m/초 | ||
| 슈트 중심 거리 | 2200mm | ||
| 최대 분류 효율성 | 6000PPH(소포 길이 800mm) | ||
| 최대 정렬 크기 | 1600X1000(LXW) | ||
| 최대 분류 무게 | 60kg | ||
| 슈트 폭 | 2400-2500mm | ||
| 구획 사이의 최소 간격 | 300mm | ||
| 캐리어 피치 | 15.24mm | ||
| 벨트 폭 | 140mm | ||
| 변속 각도 | 25도 너비 1000mm, 32도 너비 1200mm | ||
| 솔레노이드 벨브 | |||
| 안건 | 매개변수 | |||
| 모터 파워 | 9kw(30-40m) | 11kw(40-50m) | 15kw(50-60m) | 18.5kw(60-100m) |
| 이송 속도 | 2-2.2m/s | |||
| 최소 슈트 폭 | 1000mm | |||
| 최대 분류 효율성 | 8500PPH(소포 길이 400mm) | |||
| 전기 드럼 모터 전력 | 300W | |||
| 선적 중량 | 60kg/m | |||
| 슈트 폭 | 2400-2500mm | |||
| 캐리어 피치 | 15.24mm | |||
| 벨트 폭 | 126mm | |||
애플리케이션
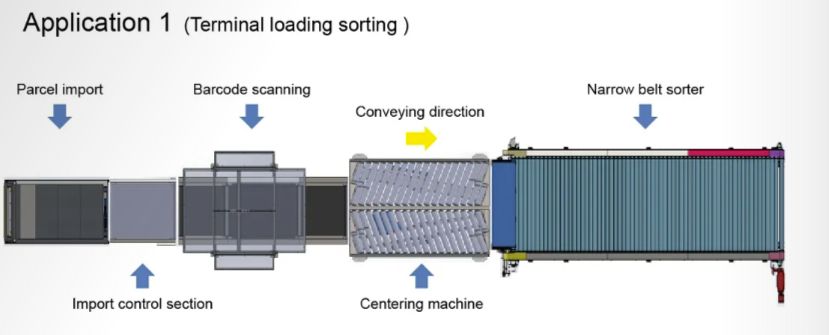
터미널 로딩 정렬
1. 소포는 텔레스코픽 벨트 컨베이어 또는 기타 방법을 통해 분류 라인으로 수입되었습니다.
2. 수입통제부에서 소포 거리를 확보하고 바코드 그리드 정보 및 치수 정보를 판독한 후 소포를 통제했습니다.
3. 좁은 벨트 분류기는 센터링 기계를 통과한 후 지정된 그리드로 분류합니다.
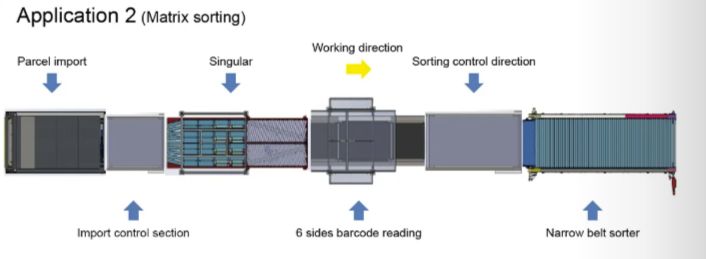
매트릭스 정렬
1. 소포는 텔레스코픽 벨트 컨베이어 또는 기타 방법을 통해 분류 라인으로 수입되었습니다.
2. 소포는 단일 시스템 판독 후, 바코드 그리드 정보 및 치수 정보를 판독한 후 단일 물품으로 운송되었습니다.
3. 좁은 벨트 분류기는 통제 구역 이후 지정된 그리드에 소포를 분류합니다.
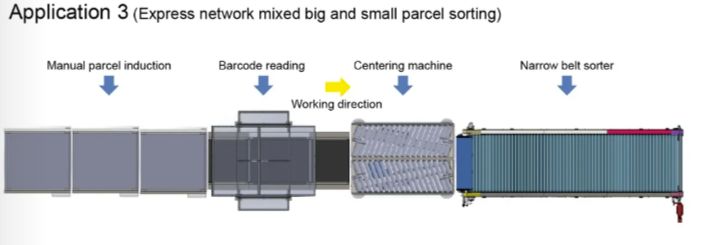
시스템 실행 흐름
1. 유도 벨트에 수동으로 소포를 올려 놓고 각 벨트에는 하나의 소포만 허용되므로 각 소포가 제어됩니다.
2. 바코드 판독을 통해 구획 격자 및 치수 정보를 읽었습니다.
3. 분류된 소포는 기계를 센터링한 후 지정된 그리드에 떨어집니다.
현장사례