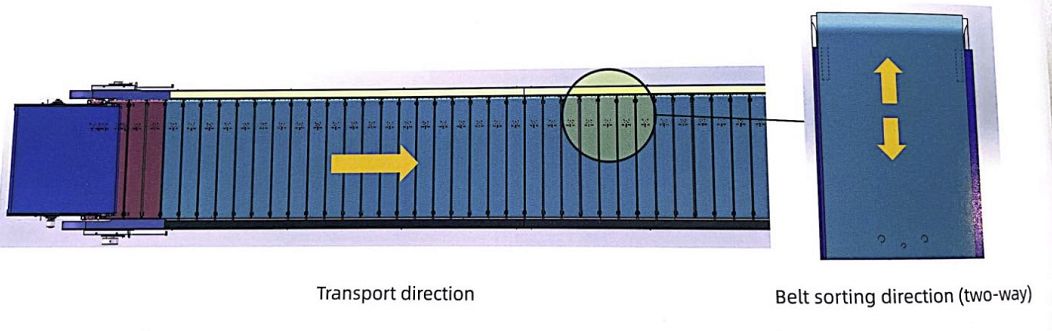
선형 교차 벨트 분류기는 소포를 운반하는 벨트 운반을 구동하기 위해 체인을 통해 모터에 의해 구동됩니다.스캐닝 시스템이 슈트 및 크기 정보를 얻은 후트롤리의 벨트가 분류 방향으로 하나씩 이동하도록 PLC 요구를 통해 슈트에서 전환 메커니즘을 트리거하여 소포를 슈트로 전달하고 소포 분류 목적을 달성합니다.
| 안건 | 매개변수 | ||
| 모터 파워 | 11kw(30-40m) | 15kw(40-50m) | 18.5kw(50-60m) |
| 운반 폭 | 1000mm | ||
| 이송 속도 | 1.5m/s | ||
| 낙하산 중심 거리 | 2200mm | ||
| 최대 분류 효율 | 6000PPH(소포 길이 800mm) | ||
| 최대 정렬 크기 | 1600X1000(세로폭) | ||
| 최대 분류 중량 | 60kg | ||
| 슈트 폭 | 2400-2500mm | ||
| 소포 사이의 최소 간격 | 300mm | ||
| 캐리어 피치 | 15.24mm | ||
| 벨트 폭 | 140mm | ||
| 이동 각도 | 25도의 1000mm 너비, 32도의 1200mm 너비 | ||
| 솔레노이드 벨브 | |||
| 안건 | 매개변수 | |||
| 모터 파워 | 9kw(30-40m) | 11kw(40-50m) | 15kw(50-60m) | 18.5kw(60-100m) |
| 이송 속도 | 2-2.2m/s | |||
| 최소 슈트 너비 | 1000mm | |||
| 최대 분류 효율 | 8500PPH(소포 길이 400mm) | |||
| 전기 드럼 모터 동력 | 300W | |||
| 선적 무게 | 60kg/m | |||
| 슈트 폭 | 2400-2500mm | |||
| 캐리어 피치 | 15.24mm | |||
| 벨트 폭 | 126mm | |||
애플리케이션
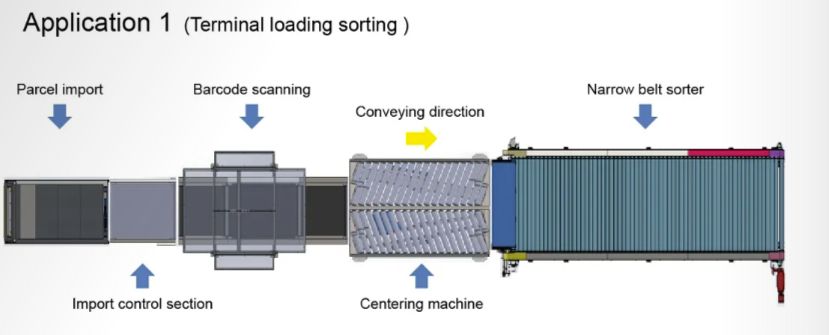
터미널 로딩 정렬
1. 텔레스코픽 벨트 컨베이어 또는 기타 방법을 통해 소포를 분류 라인으로 가져왔습니다.
2. 소포는 소포 거리를 달성하고 바코드 그리드 정보 및 치수 정보를 읽은 후 수입 관리 섹션에서 관리되었습니다.
3. 센터링 머신을 통과한 후 지정된 그리드로 내로우 벨트 소터로 분류합니다.
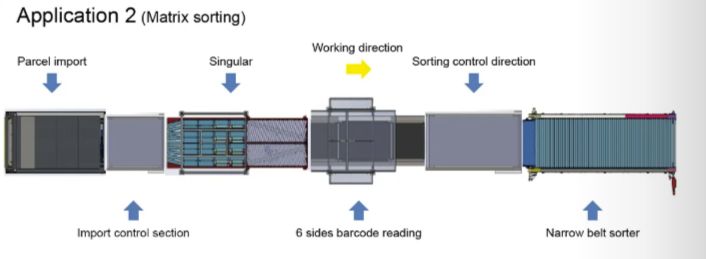
행렬 정렬
1. 텔레스코픽 벨트 컨베이어 또는 기타 방법을 통해 소포를 분류 라인으로 가져왔습니다.
2. 소포는 단일 시스템 판독 후 및 바코드 그리드 정보 및 치수 정보 판독 후 단일 조각으로 운반되었습니다.
3. 내로우 벨트 분류기는 소포를 제어 구역 다음에 지정된 그리드로 분류합니다.
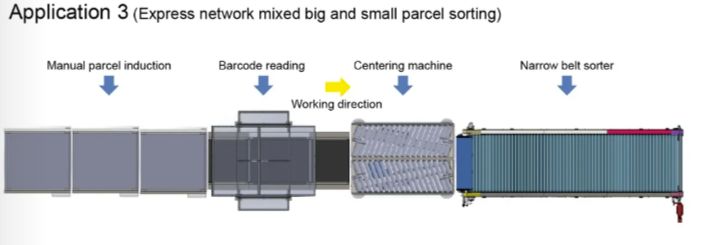
시스템 실행 흐름
1. 유도 벨트에 수동으로 소포를 넣고 각 벨트는 하나의 소포만 허용하므로 각 소포가 제어됩니다.
2. 바코드 판독에서 소포 띠 및 치수 정보를 판독했습니다.
3. 분류된 소포는 센터링 머신 후 지정된 띠에 떨어집니다.
현장사례